The Development of a Humanoid Robotics Controller
In Summary:
The goal of this project was to develop and pioneer a new means of robotic manipulation which accomplished 3 pre-set goals determined by myself.
One: The device was to be designed in a way which did not mimic many other attempts at humanoid robotic manipulation. For the record, these include but are not limited to, muscle actuation tracking, motion tracking, and controller manipulation.
Two: The device was to be designed to solve to problem of large amounts of space which must be used by the previously listed solutions.
Three: Similar to most, it was to be cost effective and done in a simple manner.
What was the Design:
The base idea of the design of this input device was built around different principles in hopes that I would be able to create a natural feeling means of manipulation. The initial design was in truth self inspired. In fact it quite literally came to me while half asleep. I felt, while I was half asleep and only slightly moving or flexing my muscles I felt as though when visualizing a different world, a dream, I felt that I was truly in motion. In fact the same is true with those who have lost limbs or parts of limbs. They feel as though they are still there through the power of the brain and its unique ability to trick its own carrier, our bodies.
Building off of this background I began to delve deeper into the problem. As many ideas began to flow the obvious issue immediately became money(something which is always a large problem with my different ideas). In order to solve this ever impending problem I broke the issue down into parts to attempt to find the cheapest solution. I found that I needed to have sensors which would track different parts of the hand, a cheap but fast moving robotic hand, and a means to communicate between the two. At the same time it is fair to note that the allotted time for completing the project was one semester which was also a factor in the choice of the final design.
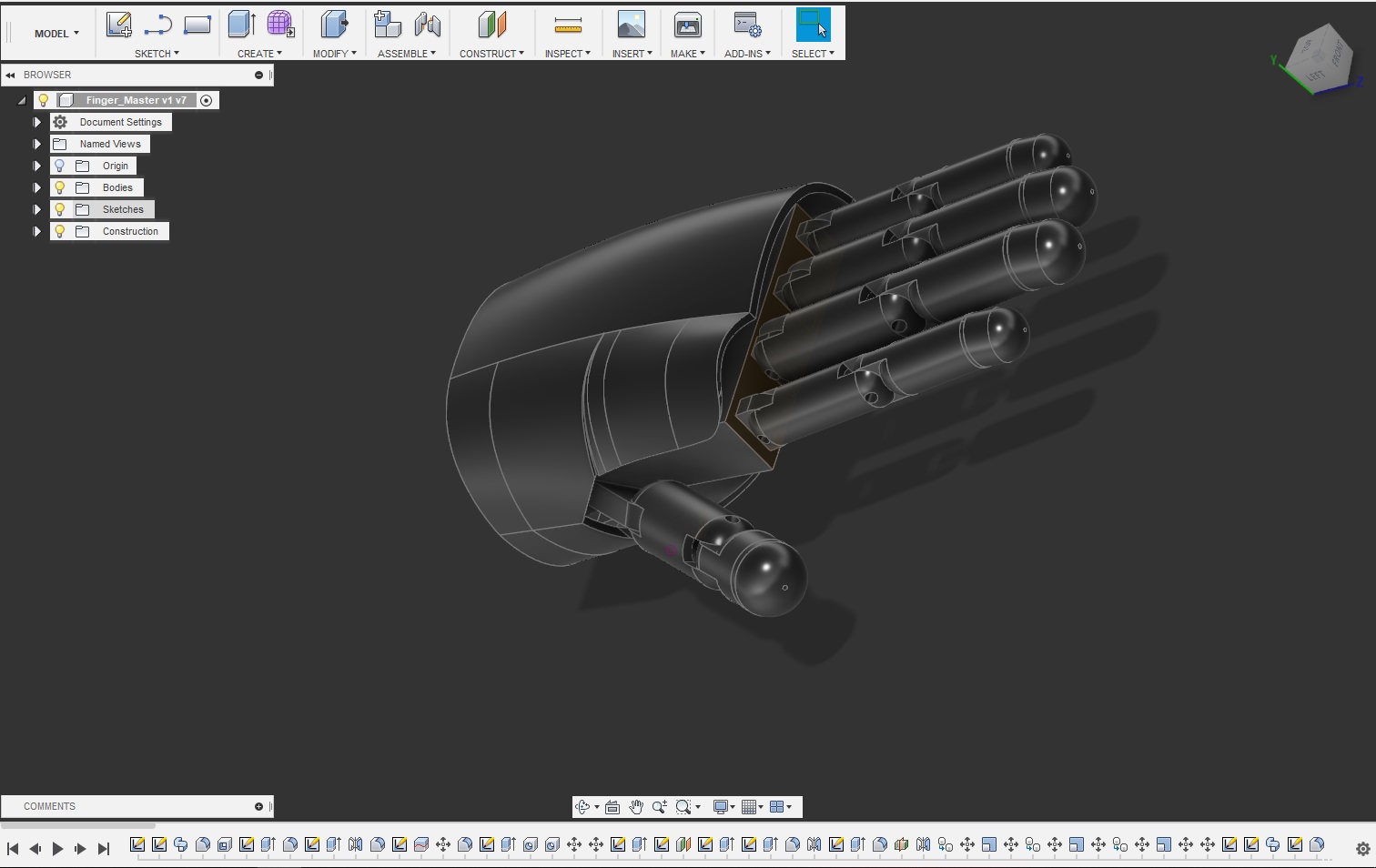
To come to terms with a fast and cheap robotic hand I was able to find an open source project which had most all things necessary for completion available online for download and manufacture by means of 3D printing.
Full Paper Below(50 page)
Child Prosthetic Design – 30 hour hackathon challenge